Los resúmenes, toma nota de los textos que figuran en nuestra página web se ponen a disposición de forma gratuita con fines didácticos de la ilustración, científica, social, civil y cultural a todos los posibles interesados de acuerdo con el concepto de uso justo, y con el 'objetivo de cumplimiento de la Directiva Europea 2001/29 / CE y del «arte. 70 de la ley 633/1941 sobre derechos de autor
La información médica y de la salud en este sitio es de carácter general y para propósitos informativos solamente y por lo tanto no puede en ningún caso sustituir el consejo de un médico (o un autorizado legalmente a la profesión).
Los motores paso a paso (P-P) pueden verse como motores eléctricos sin sistema de conmutación. Típicamente, todas las bobinas del motor están en el estator y el rotor es, o un imán permanente o, en el caso de motores de reluctancia variables, un bloque de algún material magnéticamente blando. Toda la conmutación debe ser manejada externamente por el controlador del motor y, habitualmente, los motores y controladores están diseñados para que el motor pueda ser mantenido en una posición o rotar en uno u otro sentido. La mayoría de estos motores pueden ser manejados a frecuencias de audio permitiendo un giro rápido y, con un controlador apropiado, pueden ser arrancados y parados en posiciones controladas.


Para algunas aplicaciones existe una posibilidad de elección entre el uso de servomotores y de motores P-P. Ambos tipos ofrecen prestaciones similares para posicionamientos precisos, pero difieren en algunos aspectos. Los servomotores requieren sistemas de realimentación analógica. Típicamente, esto involucra un potenciómetro para proporcionar realimentación acerca de la posición del rotor, y alguna circuitería para dirigir corriente a través del motor de forma inversamente proporcional a la diferencia entre la posición actual y la deseada. La elección entre uno u otro tipos de motor dependen fundamentalmente de la aplicación. Por ejemplo, la repetibilidad del posicionado con un motor P-P depende de la geometría del rotor, mientras que en el servomotor generalmente depende de la estabilidad del potenciómetro y de otros componentes del circuito de realimentación.
Los motores P-P pueden ser usados en sistemas simples de control en lazo abierto. Estos son adecuados generalmente en sistemas que operan a bajas aceleraciones con cargas estáticas; el lazo cerrado puede ser esencial para aceleraciones elevadas, particularmente si involucran cargas variables. Si se sobrecara un motor P-P en un sistema de control de lazo abierto todo el conocimiento acerca de la posición del rotor se pierde y el sistema debe ser reiniciado. Lo servomotores no presentan este problema.
Los motores P-P son ideales para la construcción de mecanismos en donde se requieren movimientos muy precisos. La característica principal de estos motores es el hecho de poder moverlos un paso por cada pulso que se le aplique. Este paso puede variar desde 90° hasta pequeños movimientos de tan solo 1.8° (e incluso hasta de 0.72º), es decir, que se necesitarán 4 pasos en el primer caso (90°) y 200 para el segundo caso (1.8°), para completar un giro completo de 360° (resolución de un motor P-P).
Estos motores poseen la habilidad de poder quedar enclavados en una posición, o bien totalmente libres. Si una o más de sus bobinas está alimentada, el motor estará enclavado en la posición correspondiente y, por el contrario, quedará completamente libre si no circula corriente por ninguna de sus bobinas.
Los motores P-P se presentan en dos variedades, de imán permanente y de reluctancia variable (existen también motores híbridos, que son indistinguibles de los de imán permanente desde el punto de vista del controlador).
Si el estator del motor tiene tres bobinas, conectadas típicamente como en la siguiente figura, con un terminal común, C, a todas las bobinas, será probablemente un motor P-P de reluctancia variable. El conductor común se conecta habitualmente al borne positivo y las bobinas son alimentadas siguiendo una secuencia consecutiva.
Estos motores no contienen imanes permanentes. El estator es similar a un motor de c.c. de escobillas, sin embargo, el rotor sólo consta de hierro laminado. El par se produce como resultado de la atracción entre las bobinas y el rotor férrico. El rotor forma un circuito magnético con el polo del estator. La reluctancia de un circuito magnético es el equivalente magnético a la resistencia de un circuito eléctrico. Cuando el rotor está alineado con el estator el hueco entre ambos es muy pequeño y en este momento la reluctancia está al mínimo. La inductancia del bobinado también varía cuando el rotor gira. Cuando el rotor está fuera de la alineación, la inductancia es muy baja, y la corriente aumentará rápidamente. Cuando el rotor se alinea con el estator, la inductancia será muy grande. Esta es una de las dificultades de manejar un motor de esta clase.
Los motores P-P de imán permanente son los mas usados en robótica. Básicamente, están constituidos por un rotor sobre el que van aplicados distintos imanes permanentes, y por un cierto número de bobinas excitadoras bobinadas en su estator. Así, las bobinas son parte del estator y el rotor es un imán permanente. Toda la conmutación (o excitación de las bobinas) debe ser externamente manejada por un controlador.

Existen dos tipos de motores paso a paso de imán permanente:
Bipolar: Estos tienen generalmente cuatro cables de salida. Necesitan ciertos trucos para ser controlados, debido a que requieren del cambio de dirección del flujo de corriente a través de las bobinas en la secuencia apropiada para realizar un movimiento. Esto hace que la controladora se vuelva mas compleja y costosa. Su uso no es tan común como en el caso de los de tipo unipolar. |
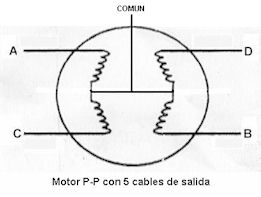
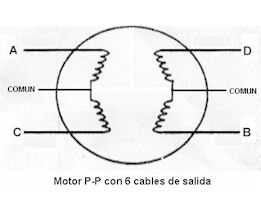
Unipolar: Estos motores suelen tener 8, 6 o 5 cables de salida, dependiendo de su conexionado interno. Este tipo se caracteriza por ser más simple de controlar. |
Existen tres secuencias posibles para este tipo de motores, que se detallan a continuación. Todas las secuencias comienzan nuevamente por el paso 1 una vez alcanzado el paso final (4 u 8). Para invertir el sentido de giro, simplemente se deben ejecutar las secuencias en modo inverso.
PASO |
Bobina A |
Bobina B |
Bobina C |
Bobina D |
|
1 |
ON |
ON |
OFF |
OFF |
|
2 |
OFF |
ON |
ON |
OFF |
|
3 |
OFF |
OFF |
ON |
ON |
|
4 |
ON |
OFF |
OFF |
ON |
|
A continuación se puede apreciar la secuencia animada en modo normal:
PASO |
Bobina A |
Bobina B |
Bobina C |
Bobina D |
|
1 |
ON |
OFF |
OFF |
OFF |
|
2 |
OFF |
ON |
OFF |
OFF |
|
3 |
OFF |
OFF |
ON |
OFF |
|
4 |
OFF |
OFF |
OFF |
ON |
|
A continuación se puede apreciar la secuencia animada en modo básico:
PASO |
Bobina A |
Bobina B |
Bobina C |
Bobina D |
|
1 |
ON |
OFF |
OFF |
OFF |
|
2 |
ON |
ON |
OFF |
OFF |
|
3 |
OFF |
ON |
OFF |
OFF |
|
4 |
OFF |
ON |
ON |
OFF |
|
5 |
OFF |
OFF |
ON |
OFF |
|
6 |
OFF |
OFF |
ON |
ON |
|
7 |
OFF |
OFF |
OFF |
ON |
|
8 |
ON |
OFF |
OFF |
ON |
|
A continuación se puede apreciar la secuencia animada en modo medio paso:
Estos motores no se caracterizan únicamente por su voltaje. Las siguientes magnitudes caracterizan a un determinado motor P-P:
Cabe destacar que debido a que los motores paso a paso son dispositivos mecánicos, y como tal deben vencer ciertas inercias, el tiempo de duración y la frecuencia de los pulsos aplicados es un punto muy importante a tener en cuenta. En tal sentido, el motor debe alcanzar el paso antes de que la próxima secuencia de pulsos comience. Si la frecuencia de pulsos es muy elevada, el motor puede reaccionar en alguna de las siguientes formas:
Para obtener un arranque suave y preciso, es recomendable comenzar con una frecuencia de pulso baja y gradualmente ir aumentándola hasta la velocidad deseada sin superar la máxima tolerada. El giro en inversa debería también ser realizado previamente bajando la velocidad de giro y luego cambiar el sentido de rotación.
Este tipo de motores es muy interesante para aquellas aplicaciones en las que se necesita tener un control del movimiento del motor (conocer cuánto se ha desplazado el motor) sin necesidad de tener que añadir ningún tipo de encoder. Las posibles desventajas encontradas en la utilización de este tipo de motor son: primero, la necesidad de emplear un encoder para situar el motor en la posición inicial antes de arrancar el motor, ya que nunca se puede saber hacia donde se encuentra orientado el eje al inicio y, segundo, si se quiere mover el motor un número de grados determinado, es necesario hacer pasar al motor por todos los pasos anteriores a esa posición. En estas situaciones, el uso de un servo es más eficiente, ya que en todo momento se puede situar el motor en la posición requerida y con una única orden, la señal PWM adecuada.
Fuente del documento: http://www.profesaulosuna.com/data/files/ROBOTICA/MOTOR%20PAP/Motores%20paso%20a%20paso.doc
Sitio para visitar: http://www.profesaulosuna.com
Autor del texto: no especificado en el documento de origen o se indique en el texto
Las letras son propiedad de sus respectivos autores y les damos las gracias por la oportunidad que nos brindan para conocer sus textos libres para fines ilustrativos y educativos. Si usted es el autor del texto y que está interesado para solicitar la eliminación del texto o la inserción de otra información envíe un correo electrónico después de que los controles adecuados que va a satisfacer su solicitud tan pronto como sea posible.
Los resúmenes, toma nota de los textos que figuran en nuestra página web se ponen a disposición de forma gratuita con fines didácticos de la ilustración, científica, social, civil y cultural a todos los posibles interesados de acuerdo con el concepto de uso justo, y con el 'objetivo de cumplimiento de la Directiva Europea 2001/29 / CE y del «arte. 70 de la ley 633/1941 sobre derechos de autor
La información médica y de la salud en este sitio es de carácter general y para propósitos informativos solamente y por lo tanto no puede en ningún caso sustituir el consejo de un médico (o un autorizado legalmente a la profesión).















